

WELCOME- The Marine Turbulence Laboratory is dedicated to understanding the nature of ocean turbulence and its relationship to the mixing of physical, chemical, and biological constituents. Emphasis is on the coastal waters where turbulence often is a critical factor in determining overall water mass circulation through its frictional effects, particularly in the surface and bottom boundary layers. The programs of the Marine Turbulence Laboratory are very diverse and are aimed at both breaking new scientific ground on understanding the fundamental nature of turbulence and its relationship to larger scale flow fields as well as in developing new tools and techniques of measuring turbulence. We also are heavily involved in interdisciplinary programs understanding the role of turbulence in small scale biology.
Lab members
SMAST Homepage
UMASS Dartmouth
Updates:
LatMix 2012 Ocean Sciences talk
LatMix 2011 Field work
 Turbulence REMUS Upgrades
Turbulence REMUS UpgradesFunding and Employment Opportunities
Research Projects:
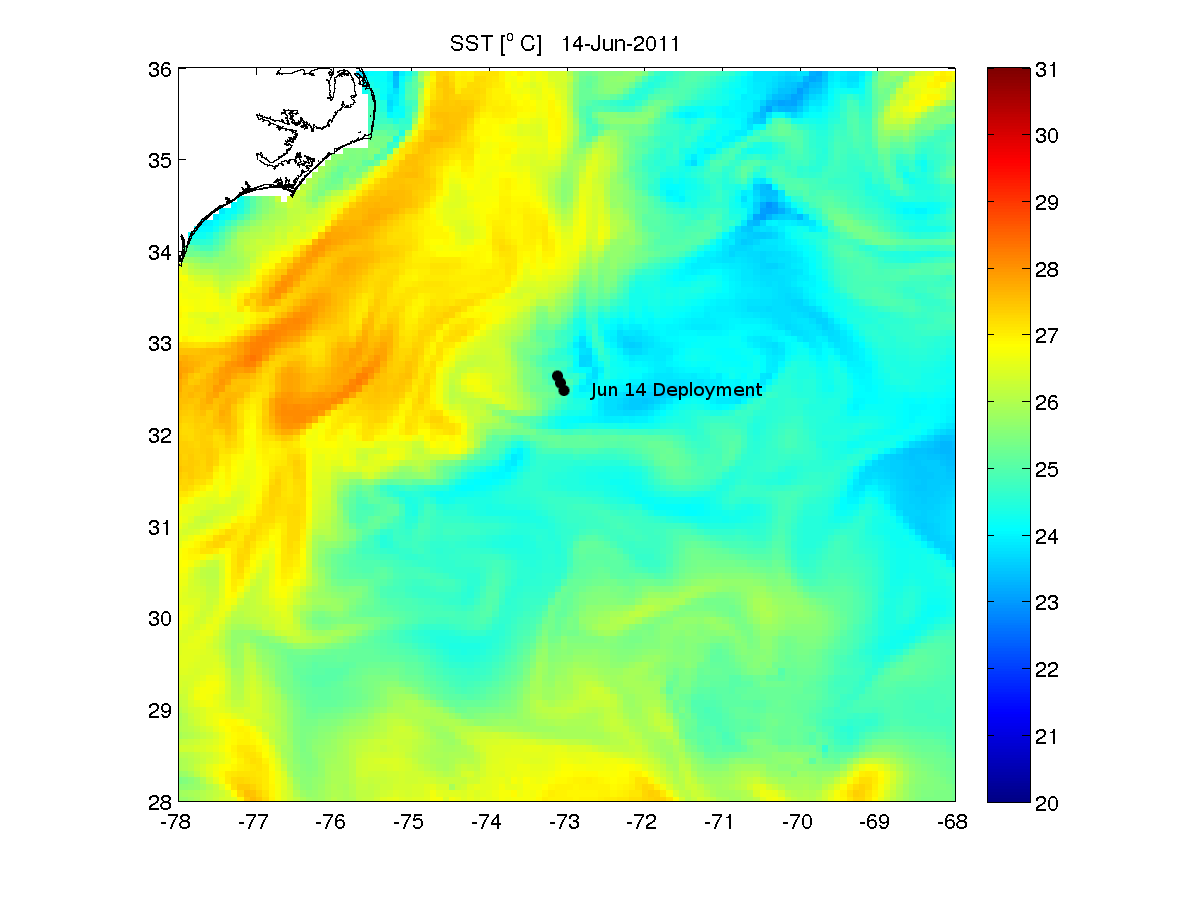 LatMix 2011 Field work
LatMix 2011 Field workMerMADE: Merrimack River Mixing and Divergence Experiment
AUV Turbulence Measurements in the LOCO Field Experiments
Recent Manuscripts:
Complete list
Goodman, L., Sastre-Cordova, M. (2011), On observing acoustic backscattering from salinity turbulence. J. Acoust. Soc. Am., 130.2 (2011):707-715.
Goodman, L. (2011), Application of the Robinson biodynamical theory to turbulence. Dynamics of Atmospheres and Oceans, 52.1-2(2011):8-19.
Sullivan, J. M., McManus, M. A., Cheriton, O. M., Benoit-Bird, K. J., Goodman, L., Wang, Z., Ryan, J. P., Stacey, M., Holliday, D. V., Greenlaw, C., Moline, M. A., & McFarland, M. (2010). Layered organization in the coastal ocean: An introduction to planktonic thin layers and the LOCO project. Cont. Shelf Res., 30(1), 1-6.
Wang, Z., & Goodman, L. (2010). The evolution of a thin phytoplankton layer in strong turbulence. Cont. Shelf Res., 30(1), 104-118.
Goodman, L., Levine, E.R. and Wang, Z. (2010). Sub surface observations of surface waves from an autonomous underwater vehicle (AUV). IEEE Journal of Oceanic Engineering 35(4), 779-784. doi:10.1109/JOE.2010.2060551
Wang, Z. and Goodman, L. (2009), Evolution of the spatial structure of a thin phytoplankton layer into a turbulent field. Marine Ecology Progress Series. 374:57-74 Doi:10.3354/meps07738.
Levine, E.R., Goodman, L., & O'Donnell, J. (2009). Turbulence in coastal fronts near the mouths of Block Island and Long Island Sounds. J. Marine Syst., 78(3), 476-488, October.
 Second generation SMAST turbulence AUV, pictured underway.
Second generation SMAST turbulence AUV, pictured underway.
Laboratory Interests
Our principal investigation is quantification of realistic turbulence regimes through the use of the SMAST Turbulence Remote Environmental Measuring Unit (REMUS). Acquired from Hydroid Inc. and retrofitted with a suite of microstructure and finestructure sensors, this Autonomous Underwater Vehicle (AUV) is capable of a wide variety of missions.
The suite of sensors integrated within the AUV allow a synoptic map of fine and microstructure quantities to be obtained and can be used to close the Turbulent Kinetic Energy Budget (On Closing the Turbulent Kinetic Energy Budget from an AUV, Goodman, Levine, and Lueck (2006) J. Atoms. Ocean. Tech. 23, 977-990.), one of the areas of interest for the Turbulence Lab.
 Local field testing in Buzzards Bay, 2010
Local field testing in Buzzards Bay, 2010
The SMAST Marine Turbulence Lab has participated in a wide variety of experiments in recent years, including Layered Organization in the Coastal Ocean (LOCO) in 2006, the Merrimack River Mixing and Divergence Experiment, (MerMADE) in 2007 and 2010, and most recently, a study to examine sub-mesoscale lateral mixing, (LatMix) in 2011.
Show below is a depiction of the T-REMUS as it navigates around a drifting buoy. By continuously measuring acoustic range to the buoy, the T-REMUS is able to navigate in a box-like pattern centered around the buoy system as the entire buoy system drifts. The buoy's three main parts are the communication buoy, which has RF and IRIDIUM communications with ship or shore, GPS, and acoustic communications with the T-REMUS while underway, a second buoy with a self contained 50m thermistor chain and datalogger, made by RBR, and a third buoy with a 10m long drogue that allows the buoy to follow a specific parcel of water.